





Новости компании

Почему моделирование надколенника важно при TKA — и как оно улучшает результаты лечения пациентов
Когда речь заходит об успехе тотального эндопротезирования коленного сустава (TKA), обсуждение обычно сосредоточено на выравнивании, долговечности имплантата или балансе мягких тканей. Но есть один фактор, который незаметно определяет, выйдет ли пациент из больницы довольным или разочарованным: пателлофеморальный сустав. Забытая надколенник может свести на нет даже идеально выполненное эндопротезирование колена. Именно поэтому моделирование надколенника — возможность виртуально смоделировать и спрогнозировать его трекинг и контактные силы еще до первого костного реза — из приятного дополнения превратилось в клиническую необходимость. Клиническая проблема, которую нельзя игнорировать Боль в переднем отделе колена по-прежнему остается одним из самых распространенных осложнений после TKA, по некоторым исследованиям затрагивая до 20–30% пациентов. Это приводит к неудовлетворенности, ревизионным операциям и росту расходов на здравоохранение. В чем корень проблемы? Часто — в несоответствии между геометрией имплантата и естественной пателлофеморальной биомеханикой пациента. Традиционные инструменты хирургического планирования рассматривают надколенник как второстепенный элемент. Но у каждого пациента своя высота надколенника, форма блока бедренной кости и Q-угол. Без индивидуального моделирования надколенника мы фактически лишь предполагаем, как он будет двигаться после операции. Как моделирование надколенника меняет правила игры Моделирование надколенника позволяет хирургической команде: Визуализировать трекинг надколенника в реальном времени во всем объеме движений — от разгибания до глубокого сгибания. Выявлять потенциальное «переполнение» или «недорез» пателлофеморального отдела до выполнения необратимых костных резекций. Оптимизировать ротацию имплантата и размер бедренного компонента, чтобы восстановить естественную борозду блока бедренной кости. Снижать частоту латерального релиза ретинакулума за счет заблаговременной балансировки пателлофеморальных сил. Результат? Более плавное восстановление после операции, меньшая боль в переднем отделе колена и колено, которое ощущается для пациента более естественно. Ценностное предложение для хирургов и больниц Для хирургов моделирование надколенника сокращает количество догадок во время операции и снижает риск ревизии. Для больниц и систем здравоохранения оно способствует более высоким показателям удовлетворенности пациентов, более короткой госпитализации и меньшей частоте повторных госпитализаций в течение 90 дней — ключевым метрикам моделей оказания помощи, ориентированных на ценность. А для пациентов? Они снова могут ходить в походы, вставать на колени и играть с внуками без той самой надоедливой боли в переднем отделе колена. Взгляд в будущее: моделирование как новый стандарт лечения Мы вступаем в эпоху, когда предиктивная биомеханика будет определять хирургическое совершенство. Точно так же, как предоперационное шаблонирование при эндопротезировании тазобедренного сустава стало повсеместной практикой, моделирование пателлофеморального сустава движется к тому, чтобы стать обязательным этапом современной хирургии колена. В вашей практике что является самым большим препятствием в управлении трекингом надколенника? Опыт или технологии? Если вы уже увидели эффект от моделирования в своей практике или хотите узнать об этой технологии больше, давайте начнем разговор.
За пределами замкнутого контура: стратегический переход к открытой платформе и субмиллиметровой точности в ортопедии
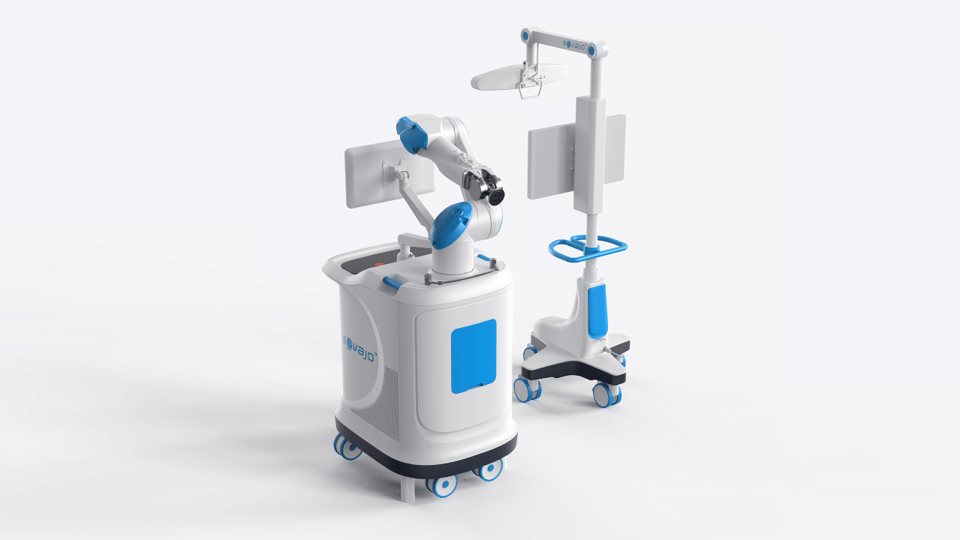
Стремительное распространение робот-ассистированной тотальной артропластики коленного сустава (TKA) поставило перед хирургическими отделениями широкий спектр технологических выборов. Помимо первоначальной маркетинговой привлекательности, клиническая ценность роботизированной платформы определяется ее механической архитектурой, режимом выполнения и интеграцией в существующую протезную экосистему. Этот обзор описывает ключевые технические параметры, которые хирурги и администраторы больниц должны оценивать, чтобы обеспечить долгосрочный клинический и операционный успех. 1. Глобальный ландшафт: архитектурные типы Сегодняшний рынок разделен между признанными глобальными платформами и новыми высокоточными инноваторами. Эти системы можно классифицировать по их механической философии: Наследуемые навигационные системы: Проверенные платформы, ориентированные на выравнивание и позиционирование, часто с компактным форм-фактором или настольным исполнением. Интегрированные полуактивные платформы: Системы, использующие специализированную роботизированную руку для помощи или выполнения резекции кости. В этой категории новое поколение систем с высокой жесткостью, таких как Sovajo, бросает вызов ранним отраслевым стандартам, делая механическую стабильность основой точности. 2. Ключевые метрики оценки для закупки хирургических систем I. Точность регистрации: рубеж субмиллиметровой точности Хотя первое поколение роботизированных ассистентов установило отраслевой стандарт точности примерно 0,3 мм–0,5 мм, инженерные достижения вывели этот рубеж еще дальше. Клиническая значимость: Хирурги должны различать «точность статического планирования» и «точность активной регистрации». Новые платформы с высокой жесткостью демонстрируют зарегистрированную точность 0,15 мм. Такое уменьшение погрешности жизненно важно для сложных случаев, когда морфология кости искажена, поскольку оно обеспечивает максимально точное соответствие физического выполнения цифровому плану. II. Режим выполнения: полуактивные системы vs пассивная навигация Фундаментальное различие заключается в том, как робот взаимодействует с хирургическим инструментом: Пассивная навигация («роботизированный джигорожитель»): Робот позиционирует направляющую для резекции, а хирург вручную управляет пилой. Хотя это обеспечивает выравнивание, оно не защищает от ручного отклонения или повреждения мягких тканей во время реза. Полуактивное выполнение (интегрированный инструментальный блок): Продвинутые платформы используют роботизированную руку, которая напрямую управляет инструментом (например, осциллирующей пилой). III. Механическая философия: конструкции с высокой жесткостью vs гибкой рукой Физическая конструкция роботизированной руки существенно влияет на ее работу под нагрузкой при резекции кости. Гибкие/легкие манипуляторы: Обычно рассчитанные на мобильность, такие манипуляторы могут требовать инвазивных фиксаторов для ног, чтобы компенсировать возможные смещения и отсутствие собственной жесткости во время реза. Манипуляторы высокой жесткости: Используя усиленный манипулятор высокой жесткости, такие системы, как Sovajo устраняют микровибрации во время активного резания. IV. Архитектура экосистемы: открытая платформа против замкнутого контура Выбор между проприетарными и нейтральными системами — один из ключевых факторов долгосрочной окупаемости инвестиций: Закрытые системы: Они привязаны к фирменным имплантам конкретного производителя. Хотя такие решения интегрированы, они ограничивают клинический выбор хирурга и могут повышать уязвимость больницы в цепочке поставок. Открытые платформы (не зависящие от имплантов): Лидеры нового поколения все чаще придерживаются философии открытой платформы. Синергия: Система, совместимая с несколькими ведущими брендами имплантов (различными международными линейками), позволяет больнице использовать имеющиеся запасы. Это защищает маржу дистрибьютора и дает возможность подбирать имплант под конкретного пациента без ограничений со стороны робота. Заключение: определяя будущий стандарт Для хирургического отделения идеальная инвестиция в роботизированную систему — это решение, не допускающее компромиссов в исполнении. Платформа, которая сочетает субмиллиметровую точность (0,15 мм), активную безопасность полуактивной системы, и механическую стабильность манипулятора высокой жесткости представляет собой нынешний пик ортопедической инженерии. Когда эти функции объединены в рамках архитектуры открытой платформы, результатом становится система, которая улучшает клинические результаты при сохранении максимальной операционной гибкости.
Революция в эндопротезировании суставов: почему «жесткость» — новый золотой стандарт в ортопедической робототехнике
На протяжении многих лет ортопедические хирурги используют роботизированную помощь для улучшения результатов TKA/THA. Однако многие системы раннего поколения принесли и собственный набор клинических проблем — в частности те, что использовали «гибкие/легкие» роботизированные руки. Основные проблемы хирургов: ❌ Нестабильность точности: гибкие манипуляторы часто страдают от микровибраций во время активной костной резки, что приводит к ошибкам остеотомии, превышающим 2–3 мм. ❌ Сложность процедуры: чтобы компенсировать гибкость руки, эти системы требуют инвазивных фиксаторов/иммобилайзеров для ног, чтобы пациент не сдвинулся ни на миллиметр. Это увеличивает время операции, усиливает травматизацию мягких тканей и усложняет рабочий процесс. ❌ Проблемы предсказуемости: непостоянная жесткость означает непостоянные результаты. Решение Sovajo: инженерная стабильность с манипуляторами высокой жесткости 🎯 В Sovajo мы считаем, что робот должен подстраиваться под хирурга, а не наоборот. Наша система нового поколения использует высокожесткую медицинскую роботизированную руку в сочетании с фирменными алгоритмами управления движением, чтобы решить эти устаревшие проблемы: ✅ Субмиллиметровая точность: наша жесткая рука минимизирует колебания до ✅ Рабочий процесс без фиксаторов: больше никаких громоздких фиксаторов для ноги. Стабильность нашей системы позволяет проводить процедуру более естественно и последовательно, экономя ценное операционное время. ✅ Интегрированная эффективность: благодаря тому, что пила встроена непосредственно в жесткую руку, вы получаете бесшовный опыт «интегрированного позиционирования и остеотомии». Точность не должна достигаться ценой сложности. Пришло время выйти за пределы ограничений гибких систем и принять преимущества жесткой стабильности. 🚀 Откройте для себя отличие Sovajo. Загляните в будущее ортопедической хирургии. #Ортопедия #ХирургическаяРобототехника #Медтех #TKA #ЭндопротезированиеСуставов #HealthTech #Sovajo #ЦифровоеЗдоровье #ОртопедХирург #Инновации #MedTechЮгоВосточнойАзии
